 球體結合
球體結合
![]()
![]()
![]()
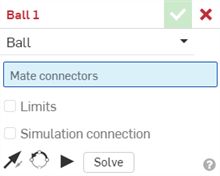
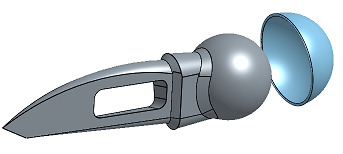
Mate two entities allowing rotational movement about the X, Y and Z axis (Rx, Ry, Rz). Begin by creating Mate connectors on each entity, or use the implicit Mate connectors visible upon hover.
「球體結合」可讓您以繞著 X、Y 和 Z 軸旋轉移動 (Rx, Ry, Rz) 的方式來結合兩個圖元。
先從在每個圖元上建立結合連接器開始,或使用游標暫留時出現的隱含結合連接器。請注意,在將結合連接器加入球體中時,僅能選擇球體的中心。
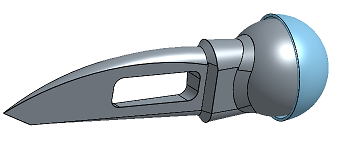
按一下組合件工具列中的「球體結合」。為旋轉移動選擇實例上的結合連接器,也就是在這個範例中的球體。接下來選擇實例上的結合連接器來做為不動點,在本例中是杯形。
若要設定動作的限制,請核取「限制」然後輸入繞 Z 軸的最大角度。會在圖形區域以虛線與終端短列視覺顯示限制。虛線代表結合的方向與距離,實線則代表結合限制。如果在結合上套用了限制,結合限制指標圖示會出現在「結合特徵」清單中。
按下製作動畫按鈕來產生結合自由度的動畫。
按一下綠色核取記號來接受新的球體結合。
步驟
- 按一下
 。
。 -
Select two Mate connectors (implicit or explicit).
請注意您僅能選擇球體的中心。
- 若要設定動作的限制,請核取 [限制] 方塊:
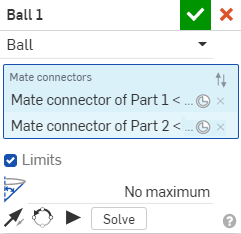
會在圖形區域以虛線與終端短列視覺顯示限制。虛線代表移動的方向與距離,實線則代表限制。
如果結合上套用有一或多個限制,則在「結合特徵」清單中的結合右側會有結合限制指標圖示
 。
。 - 如上圖所示在出現的欄位中輸入移動的旋轉度數來設定從 Z 軸的最大移動值。
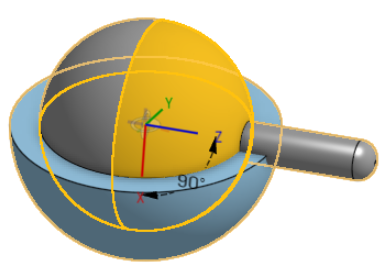
- 按一下圖元來存取操控器。
- 按一下並拖曳不同的操控器控制點來查看允許的動作;請注意,僅允許繞著 X、Y 與 Z 軸的旋轉移動 (Rx, Ry, Rz)。
The first Mate connector selected (implicit or explicit) serves as the rotational movement point and the second Mate connector selected (implicit or explicit) serves as the stationary point.
當使用操控器拖曳零件以視覺查看動作時,若已定義有限制,則在圖形區域中會顯示您無法超出限制拖曳零件:
編輯結合連接器
在於兩個明確或隱含的結合連接器之間建立結合之後,您可以編輯任何一個結合連接器:
-
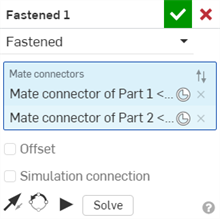
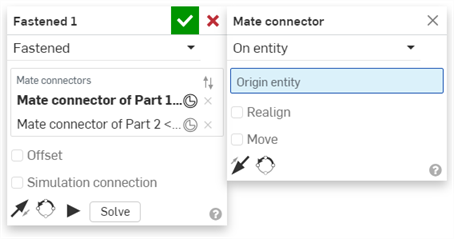
開啟結合對話方塊。在下方的範例中使用「緊固」結合來說明。除了未使用結合連接器的「相切」結合外,這個過程對所有的結合都是類似的。
-
按一下「結合連接器」圖示 (
 )。「結合連接器」對話方塊開啟,您可於其中編輯結合連接器的起源類型、起源圖元、對齊、位置、主軸方向、與副軸方位:
)。「結合連接器」對話方塊開啟,您可於其中編輯結合連接器的起源類型、起源圖元、對齊、位置、主軸方向、與副軸方位:
在結合對話方塊中編輯結合連接器是僅限於位在目前組合件中隱含或明確的結合連接器。對於來自 Part Studio、次組合件、或連結文件中的結合連接器,則必須在其原始的位置編輯。
步驟
- Tap .
- 確認在結合類型欄位中選擇了球體。
- Select the two Mate connectors (implicit or explicit) to use.
- 選擇性使用,輕觸
 來反轉主軸,即實例的 Z 方位。
來反轉主軸,即實例的 Z 方位。 - 選擇性使用,輕觸
 來重新定向副軸;輕觸即可以 90 度旋轉實例的象限方位 (在 XY 平面上)。
來重新定向副軸;輕觸即可以 90 度旋轉實例的象限方位 (在 XY 平面上)。 - 選擇性地核取 [限制] 方塊以限制動作的移動程度:
在出現的欄位中輸入移動的旋轉度數來設定從 Z 軸的最大移動。
- 輕觸核取記號。
輕觸並拖曳,或使用三向操控器來移動零件之一。注意到僅允許繞著 X、Y 與 Z 軸旋轉移動 (Rx, Ry, Rz)。
步驟
- 輕觸 。
- 確認在結合類型欄位中選擇了球體。
- Select the two Mate connectors (implicit or explicit) to use.
- 選擇性使用,輕觸 來反轉主軸,即實例的 Z 方位。
- 選擇性使用,輕觸 來重新定向副軸;輕觸即可以 90 度旋轉實例的象限方位 (在 XY 平面上)。
- 選擇性地核取 [限制] 方塊以限制動作的移動程度:
在出現的欄位中輸入移動的旋轉度數來設定從 Z 軸的最大移動。
- 輕觸核取記號。
輕觸並拖曳,或使用三向操控器來移動零件之一。注意到僅允許繞著 X、Y 與 Z 軸旋轉移動 (Rx, Ry, Rz)。