 平面嵌合
平面嵌合
![]()
![]()
![]()
嵌合两个图元允许沿 X 轴和 Y 轴做平移运动以及绕 Z 轴做旋转运动(Ty、Tx 和 Rz)。
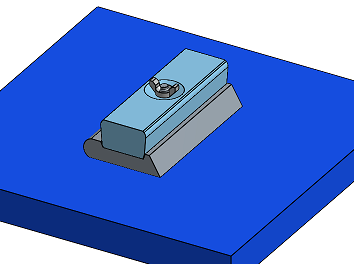
平面配合有 3 个自由度,允许在 X 和 Y 轴上进行平移以及绕 Z 轴旋转。开始新的平面配合。在两个实例的预定接触点上各选择一个点。实例会移动以使配合连接器对齐,但根据其自由度,它们并不局限于此位置。
在定义更复杂的装配体运动时,平面配合通常与其他配合配对。例如,平面配合与相切配合配对以将销固定在曲线槽中。
球配合有 3 个自由度,允许围绕 X、Y 和 Z 轴旋转。开始新的球配合。在插座中央选择一个配合连接器,在球的中心选择一个配合连接器。配合将呈现球铰接头般的运动特性。
平行配合有 4 个自由度,允许在 X、Y 和 Z 轴上进行平移,以及绕 Z 轴旋转。
开始新的平行配合。在此示例中,由机器人手臂控制的大型磁铁的底部应与底座保持平行。在两个面上选择一个相互平行的配合连接器。实例会移动,使配合连接器相互接触,但根据其自由度,它们并不局限于此位置。
步骤
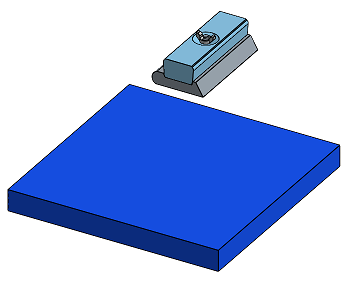
首先在每个图元上创建嵌合连接器,或使用悬停光标时可见的隐含的嵌合连接器。
- 单击
 。
。
选定的第一个嵌合连接器(隐含的或明确的)用作平移和旋转移动点,第二个嵌合连接器(隐含的或明确的)用作轴点。
要提供偏移距离,请选中“偏移”,然后提供距离。平面嵌合只能沿 Z 轴偏移图元。
偏移距离在图形区域中显示为嵌合之间的虚线,显示了值和轴。在对话框中输入距离。
单击嵌合时,将显示图形以指示由嵌合定义的 X、Y 和 Z 方向,以及限制尺寸(如果有)的偏移和范围。
应用偏移应视为移动整个坐标系。偏移相对于先选择的嵌合连接器。
您也可以选择围绕特定轴旋转零件:选择轴,然后输入旋转角度。
- 要限制移动,请选中“限制”并提供(可选的)最小值和最大值以控制嵌合的运动范围。
限制在图形区域中显示为两端带有条形的虚线。虚线表示运动的方向和距离,实线表示限制。
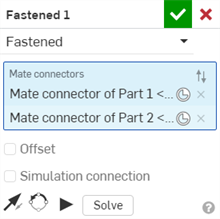
如果某个嵌合已应用一个或多个限制,则“嵌合限制指示符”图标
 会出现在“嵌合特征”列表中该嵌合的右侧。
会出现在“嵌合特征”列表中该嵌合的右侧。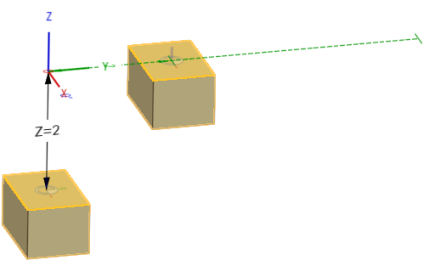
- 单击图元以访问操纵器。
- 单击并拖动各个操纵器控制柄以查看允许哪些运动。请注意,仅允许沿 X 轴和 Y 轴做平移运动以及绕 Z 轴做旋转运动(Ty、Tx 和 Rz)。
编辑嵌合连接器
一旦在两个显式或隐式嵌合连接器之间创建了嵌合连接器,您可以编辑其中任一嵌合连接器:
-
打开“嵌合”对话框。在下面的示例中,使用“紧固嵌合”作为示例。除了“相切嵌合“不使用嵌合连接器之外,所有嵌合流程都相似。
-
单击“嵌合连接器”图标 (
 )。“嵌合连接器”对话框打开,可以在其中编辑嵌合连接器的原点类型、原点图元、对齐方式、位置、主轴方向和副轴方向:
)。“嵌合连接器”对话框打开,可以在其中编辑嵌合连接器的原点类型、原点图元、对齐方式、位置、主轴方向和副轴方向:
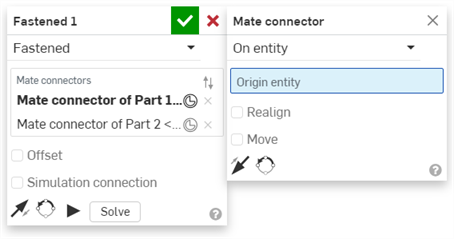
在“嵌合”对话框中编辑嵌合连接器仅限于位于当前装配体中的隐式或显式连接器。来自 Part Studio、子装配体或链接文档的配嵌合连接器必须在其原始位置进行编辑。
步骤
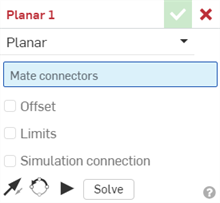
- 轻按“平面嵌合”图标 (
 )。
)。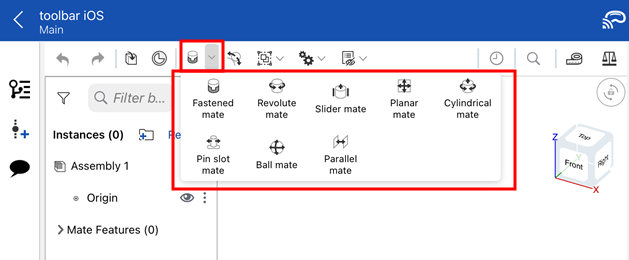
- 确认在嵌合类型输入框中选择了平面。
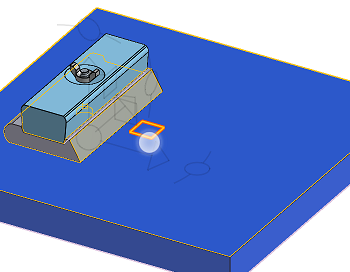
- 选择两个嵌合连接器(隐含的或明确的)进行使用。
- (可选)轻按偏移以提供偏移距离。
- (可选)轻按限制以设置移动的距离限制。
- (可选)轻按
 以翻转实例的主轴 (Z) 方向。
以翻转实例的主轴 (Z) 方向。 - (可选)轻点
 以重新定向副轴,轻点即可将实例的象限方向(在 XY 平面中)旋转 90 度。
以重新定向副轴,轻点即可将实例的象限方向(在 XY 平面中)旋转 90 度。 - 轻按复选标记。
触摸并拖动或 使用 三合一操纵器 移动其中一个部件。请注意,只允许沿 X 和 Y 轴的过渡运动,以及绕 Z 轴的旋转运动(Ty、Tx、Rz)。
步骤
- 轻按 。
- 确认在嵌合类型输入框中选择了平面。
- 选择两个嵌合连接器(隐含的或明确的)进行使用。
- (可选)轻按偏移以提供偏移距离。
- (可选)轻按限制以设置移动的距离限制。
- (可选)轻按 以翻转实例的主轴 (Z) 方向。
- (可选)轻点 以重新定向副轴,轻点即可将实例的象限方向(在 XY 平面中)旋转 90 度。
- 轻按复选标记。
轻触并拖动或 使用三重轴操纵器来移动零件之一。请注意,仅允许沿 X 轴和 Y 轴做平移移动以及绕Z轴做旋转移动(Ty、Tx 和 Rz)。