 Coincidencia cilíndrica
Coincidencia cilíndrica
![]()
![]()
![]()
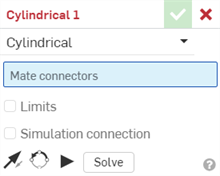
La relación entre dos entidades permite el movimiento de traslación a lo largo del eje Z y el movimiento de rotación alrededor del eje Z (Tz, Rz). Comience creando conectores de relación en cada entidad o utilice los conectores de relación implícitos visibles cuando coloca el cursor por encima.
El primer conector de relación seleccionado (implícito o explícito) sirve como punto de traslación y rotación; el segundo (implícito o explícito), como punto estático.
Las relaciones cilíndricas y de ranura de pasador tienen dos grados de libertad. La relación cilíndrica permite el desplazamiento y la rotación alrededor del eje Z.
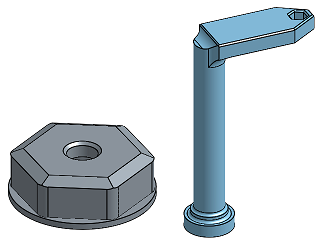
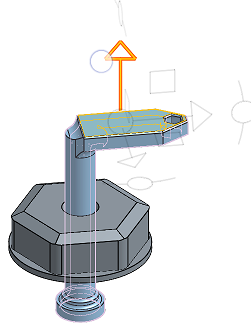
Inicie una relación cilíndrica. En este ejemplo, un mango con retroceso debe moverse a lo largo del eje principal para reflejar el movimiento de tracción. El primer punto seleccionado es la cara inferior del mango con retroceso y el segundo punto es la cara superior de la entrada del cable de la cubierta de retroceso.
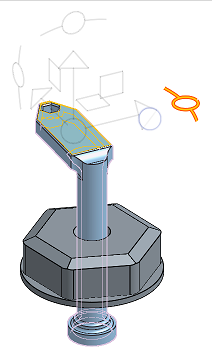
Anímelo para ver cómo el mango gira y se desplaza a lo largo del eje Z. Sin límites, se mueve libremente en ambas direcciones a lo largo del eje. Para restringir el movimiento de modo que no sobrepase la barrera de retroceso, utilice límites.
La relación de ranura de pasador permite la rotación alrededor del eje Z y el desplazamiento a lo largo del eje X.
Inicie una relación de ranura de pasador. En este ejemplo, el taladro tiene un interruptor que necesita moverse hacia arriba y hacia abajo a lo largo de una ranura. El primer punto seleccionado de una relación de ranura de pasador es la ranura y el segundo punto es el pasador. Esto se refleja en el orden de campos de los conectores de relación. Si selecciona primero el pasador accidentalmente, cambie el orden del campo para que la ranura quede en la parte superior. Haga clic en Reordenar elementos y, a continuación, utilice los controles del lado derecho para reorganizarlos. Haga clic en Aceptar para finalizar el reordenamiento.
En primer lugar, seleccione la ranura del soporte. Mueva el cursor al centro de la ranura y haga clic para colocar el primer conector de relación. A continuación, seleccione el punto correspondiente del interruptor para colocar el segundo conector de relación. Si fuera necesario, active la flecha de reorientación del eje principal para obtener la alineación correcta.
Compruebe los límites para restringir la distancia a la que se traslada y gira la relación de ranura de pasador. Para mantener el interruptor dentro de la ranura, defina la distancia mínima X en la mitad de la longitud de la ranura en negativo e introduzca un valor para la distancia máxima de la mitad de la longitud de la ranura en positivo. Dado que el interruptor no debe girar, defina las distancias mínima y máxima de Z en 0.
Cree una animación para ver los movimientos de la relación dentro de los límites definidos.
Pasos
- Haga clic en
 .
. -
Seleccione dos conectores de relación (implícitos o explícitos).
- Para imponer límites al movimiento de la relación, haga clic en Límites y proporcione las distancias mínimas para el eje de ambos conectores de relación.
Los límites se visualizan en el área gráfica como líneas discontinuas con barras en los extremos. Las líneas discontinuas representan la dirección y la distancia del movimiento y las líneas sólidas representan el límite.
Si una relación tiene uno o más límites aplicados, el icono indicador de límite de relación
 está visible a la derecha de la relación en la lista de características de relación.
está visible a la derecha de la relación en la lista de características de relación.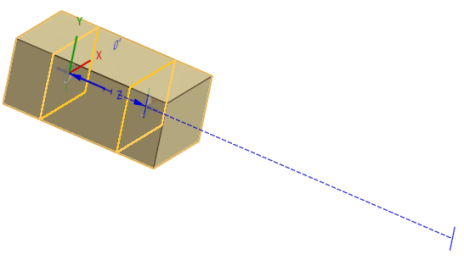
- Haga clic en la entidad para acceder al manipulador.
- Haga clic y arrastre las distintas asas del manipulador para ver qué movimientos están permitidos. Observe que sólo se permite el movimiento de traslación a lo largo del eje Z y el movimiento giratorio alrededor del eje Z (Tz, Rz).
Edición de un conector de relación
Una vez que se crea una relación entre dos conectores de relación explícitos o implícitos, puede editar cualquiera de los conectores de relación:
-
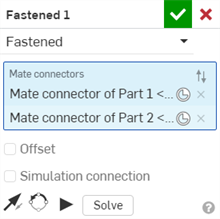
Abra el cuadro de diálogo Relacionar. A continuación, se utiliza la posición Relación cerrada como ejemplo. El proceso es similar para todas las relaciones, excepto para la Relación tangente, que no utiliza conectores de relación.
-
Haga clic en el ícono del conector de relación (
 ). Se abre el cuadro de diálogo del conector de relación, donde puede editar el tipo de origen, la entidad de origen, la alineación, la ubicación, la dirección del eje principal y la orientación del eje secundario del conector de relación:
). Se abre el cuadro de diálogo del conector de relación, donde puede editar el tipo de origen, la entidad de origen, la alineación, la ubicación, la dirección del eje principal y la orientación del eje secundario del conector de relación:
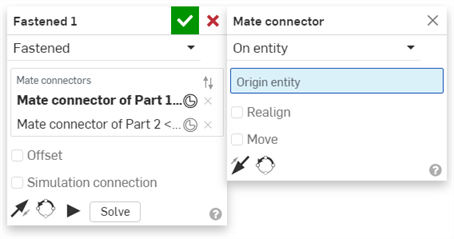
La edición de conectores de relación desde el cuadro de diálogo Relacionar se limita a los conectores implícitos o explícitos ubicados en el Ensamblaje actual. Los conectores de relación de Part Studios, subensamblajes o documentos vinculados deben editarse en su ubicación original.
Pasos
- Pulse el ícono de Relación cilíndrica (
 ).
).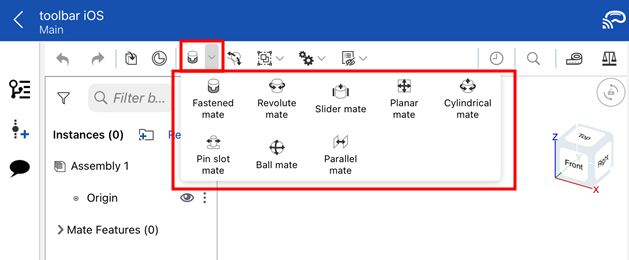
- Verifique que Cilíndrica esté seleccionado en el campo Tipo de relación.
- Seleccione dos conectores de relación (implícitos o explícitos) para usar.
- Si lo desea, pulse en Límites para establecer límites de distancia para el movimiento.
- De manera opcional, toque
 para voltear el eje principal, la orientación Z de las instancias.
para voltear el eje principal, la orientación Z de las instancias. - Opcionalmente, toque
 para Reorientar el eje secundario; gire la orientación del cuadrante (en el plano XY) de las instancias 90 grados con un toque.
para Reorientar el eje secundario; gire la orientación del cuadrante (en el plano XY) de las instancias 90 grados con un toque. - Toque la casilla de verificación.
Toque y arrastre o utilice el manipulador de tríada para mover una de las piezas. Observe que solo se permite el movimiento traslacional a lo largo del eje Z, además del movimiento giratorio alrededor del eje Z (Tz, Rz).
Pasos
- Toque .
- Verifique que Cilíndrica esté seleccionado en el campo Tipo de relación.
- Seleccione dos conectores de relación (implícitos o explícitos) para usar.
- Si lo desea, pulse en Límites para establecer límites de distancia para el movimiento.
- De manera opcional, toque para voltear el eje principal, la orientación Z de las instancias.
- Opcionalmente, toque para Reorientar el eje secundario; gire la orientación del cuadrante (en el plano XY) de las instancias 90 grados con un toque.
- Toque la casilla de verificación.
Toque y arrastre o utilice el manipulador de tríada para mover una de las piezas. Observe que solo se permite el movimiento traslacional a lo largo del eje Z, además del movimiento giratorio alrededor del eje Z (Tz, Rz).