 ピンスロット合致
ピンスロット合致
![]()
![]()
![]()
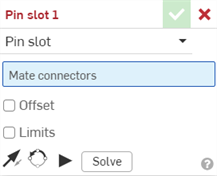
Z 軸に沿った回転運動と平行回転が可能な 2 つのエンティティ (Rz、Tx) を合致させます。まず、各エンティティに合致コネクタを作成するか、カーソルを合わせると表示される暗黙的な合致コネクタを使用します。
最初に選択した (暗黙的または明示的) 合致コネクタはピンおよび回転運動点として機能します。2 番目に選択した (暗黙的または明示的) 合致コネクタは並進移動として機能します。
円筒合致とピンスロット合致には 2 つの自由度があります。円筒合致は、Z 軸に沿った平行移動と回転が可能です。
円筒合致を始めます。この例では、引き寄せる動きを反映するため、リコイルグリップを主軸に沿って動かします。最初にリコイルグリップの下面のポイントを選択し、次にリコイルカバーのコードインレットの上面のポイントを選択します。
グリップが Z 軸に沿って回転・移動するのを確認するには、アニメーション化します。制限がない場合は、軸に沿って両方向に自由に動きます。リコイルカバーを超えないように動きを制限するには、制限を使用します。
ピンスロット合致は、Z 軸を中心とした回転と X 軸に沿った移動が可能です。
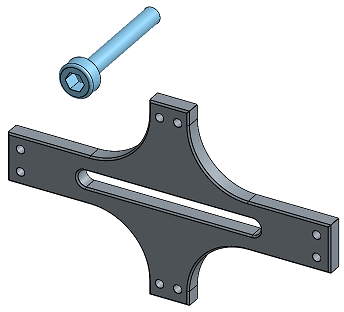
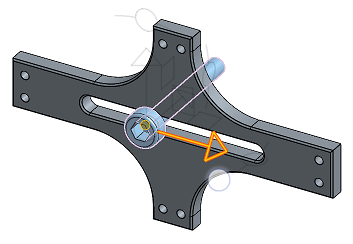
ピンスロット合致を始めます。この例では、スロットに沿って上下に動かす必要があるスイッチがドリルにあります。ピンスロット合致では、最初にスロットのポイントを選択し、次にピンのポイントを選択します。これは合致コネクタのフィールド順序に反映されます。誤って最初にピンを選択した場合は、スロットが一番上になるようにフィールド順序を変更してください。[アイテムの並べ替え] をクリックし、右側のハンドルを使って並べ替えます。[完了] をクリックして並べ替えを完了します。
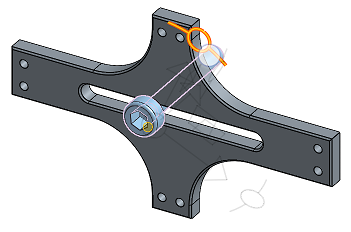
まず、ブラケットのスロットを選択します。カーソルをスロットの中央に移動し、クリックして最初の合致コネクタを配置します。次に、スイッチ上の対応するポイントを選択して、2 つ目の合致コネクタを配置します。必要に応じて、主軸の矢印の向きを変更し、正しく位置合わせしてください。
ピンスロット合致が移動・回転する距離を制限するには、[制限] をチェックします。スイッチをスロット内に収めるには、X の最小距離をスロットの長さの半分の値で負に設定し、最大距離をスロットの長さを半分の値で正に設定します。スイッチは回転させないので、Z の最小距離と最大距離を 0 に設定します。
定義された制限内での合致の動きを確認するには、アニメートします。
手順
-
 をクリックします。
をクリックします。 - 2 つの合致コネクタ (暗黙的または明示的) を選択し、最初にピンの合致コネクタを選択します。
最初に選択した合致コネクタは [ピン] (および合致の回転運動、ピンの回転) を表し、2 番目の合致コネクタは [スロット] (および合致の平行運動、スロット内で移動するピン) を表します。
- 移動を制限するには、[制限] をチェックし、(オプションで) 最小値と最大値を指定して、合致の動きの範囲を制御します。
境界は、端点にバーがある破線でグラフィック領域に表示されます。破線は移動の方向と距離を表し、実線は限界を表します。
合致に 1 つまたは複数の制限が適用されている場合、合致フィーチャーリストの合致の右側に合致制限のインジケータアイコン
 が表示されます。
が表示されます。 - オフセット距離は、合致間の破線でグラフィック領域に表示され、値と軸が表示されます。ダイアログに距離を入力します。
オフセット距離は、合致間の破線でグラフィック領域に可視化され、値と軸が表示されます。ダイアログに距離を入力します。
合致をクリックすると、グラフィックが表示され、合致によって定義された X、Y、Z の方向と、オフセットおよび寸法の制限の範囲 (存在する場合) が示されます。
オフセットを適用した場合、座標系全体を移動することで表示されます。オフセットは、最初に選択した合致コネクタ (暗黙的または明示的) を基準にします。
また、特定の軸を中心にパーツを回転するように選択することもできます。軸を選択し、回転角度を入力します。
- 図形をクリックして、マニピュレータにアクセスします。
- さまざまなマニピュレータハンドルをクリックしてドラッグし、どのモーションが許可されているかを確認します。Z 軸を中心とした回転運動と X 軸に沿った平行移動のみが許可されることに注意してください (Rz、Tx)。
合致コネクタの編集
2 つの明示的合致コネクタまたは暗黙的合致コネクタの間に合致を作成すると、どちらの合致コネクタも編集できます。
-
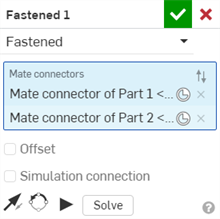
合致ダイアログを開きます。以下の例では、ファスナー合致を例として使用しています。このプロセスは、合致コネクタを使用しない接線合致を除き、すべての合致で同様です。
-
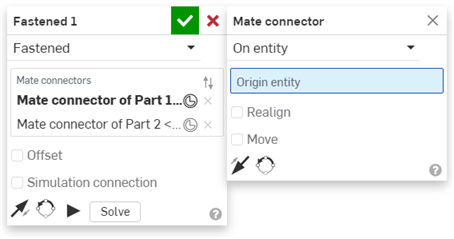
合致コネクタアイコン (
 ) をクリックします。合致コネクタダイアログが開き、合致コネクタの原点タイプ、原点エンティティ、配置、位置、主軸方向、二次軸方向を編集できます。
) をクリックします。合致コネクタダイアログが開き、合致コネクタの原点タイプ、原点エンティティ、配置、位置、主軸方向、二次軸方向を編集できます。
合致ダイアログからの合致コネクタの編集は、現在のアセンブリにある暗黙的コネクタまたは明示的コネクタに限定されます。Part Studios、サブアセンブリ、またはリンクされたドキュメントの合致コネクタは、元の場所で編集する必要があります。
手順
- ピンスロット合致アイコン (
 ) をタップします。
) をタップします。
- ピンスロット が 合致タイプ フィールドで選択されていることを確認します。
- 使用する 2 つの合致コネクタ (暗黙的または明示的) を選択します。
- 必要に応じて、オフセット をタップして、オフセット距離を指定します。
- 必要に応じて、制限 をタップして、移動距離の制限を設定します。
- 必要に応じて、
 をタップし、主軸をインスタンスの Z 方向に反転させます。
をタップし、主軸をインスタンスの Z 方向に反転させます。 - 必要に応じて、
 をタップして二次軸の方向を変更します。インスタンスの四半円方向を (XY 平面で) 1 回タップして 90 度回転します。
をタップして二次軸の方向を変更します。インスタンスの四半円方向を (XY 平面で) 1 回タップして 90 度回転します。 - チェックマークをタップします。
最初に選択した (暗黙的または明示的) 合致コネクタはピンおよび回転運動点として機能します。2 番目に選択した (暗黙的または明示的) 合致コネクタは並進移動として機能します。
タッチしてドラッグするか、またはトライアドマニピュレータ を使用して、パーツの 1 つを移動します。Z 軸を中心とした回転運動と X 軸に沿ったトランジション移動のみが許可されていることに注意してください (Rz, Tx)。
手順
-
をタップします。
- ピンスロット が 合致タイプ フィールドで選択されていることを確認します。
- 使用する 2 つの合致コネクタ (暗黙的または明示的) を選択します。
最初に選択した (暗黙的または明示的) 合致コネクタはピンおよび回転運動点として機能します。2 番目に選択した (暗黙的または明示的) 合致コネクタは並進移動として機能します。
- 必要に応じて、オフセット をタップして、オフセット距離を指定します。
- 必要に応じて、制限 をタップして、移動距離の制限を設定します。
- 必要に応じて、 をタップし、主軸をインスタンスの Z 方向に反転させます。
- 必要に応じて、 をタップして二次軸の方向を変更します。インスタンスの四半円方向を (XY 平面で) 1 回タップして 90 度回転します。
- チェックマークをタップします。
タッチしてドラッグするか、またはトライアドマニピュレータ を使用して、パーツの 1 つを移動します。Z 軸を中心とした回転運動と X 軸に沿ったトランジション移動のみが許可されていることに注意してください (Rz, Tx)。