 Contrainte planaire
Contrainte planaire
![]()
![]()
![]()
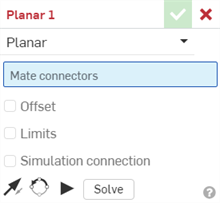
Liez deux entités en permettant un mouvement de translation le long de l'axe X et de l'axe Y, et mouvement de rotation autour de l'axe Z (Ty, Tx, Rz).
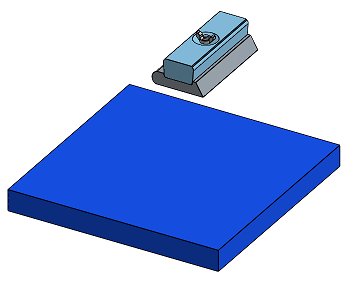
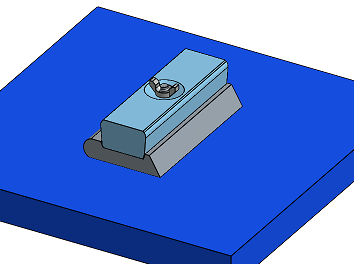
La contrainte planaire possède 3 degrés de liberté, ce qui permet une translation sur les axes X et Y et une rotation autour de l'axe Z. Créez une nouvelle contrainte planaire. Sélectionnez un point sur chaque instance où elles doivent se toucher. Les instances se déplacent de manière à aligner les connecteurs de positionnement, mais elles ne sont pas limitées à cet emplacement en ce qui concerne leurs degrés de liberté.
La contrainte planaire est souvent associée à d'autres contraintes lorsqu'il s'agit de définir des mouvements d'assemblage plus complexes. Par exemple, une contrainte planaire s'associe à une contrainte tangente pour maintenir une broche dans une rainure incurvée.
La liaison rotule dispose de 3 degrés de liberté, ce qui permet une rotation autour des axes X, Y et Z. Créez une nouvelle liaison rotule. Sélectionnez un connecteur de positionnement au centre de la prise et un connecteur de positionnement au centre de la rotule. La contrainte se déplace comme une articulation à rotule.
La contrainte parallèle dispose de 4 degrés de liberté, ce qui permet la translation sur les axes X, Y et Z, et la rotation autour de l'axe Z.
Commencez une nouvelle contrainte parallèle. Dans cet exemple, la partie inférieure d'un grand aimant contrôlé par un bras robotisé doit rester parallèle à la base. Sélectionnez un connecteur de positionnement sur les deux faces qui doivent rester parallèles l'une à l'autre. Les instances se déplacent de manière à ce que les connecteurs de positionnement se touchent, mais elles ne sont pas limitées à cet emplacement en ce qui concerne leurs degrés de liberté.
Étapes
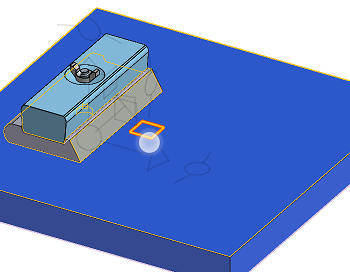
Commencez par créer des connecteurs de positionnement sur chaque entité, ou utilisez les connecteurs de positionnement implicites visibles lors du survol.
- Cliquez sur
 .
. 
Le premier connecteur de positionnement sélectionné (implicite ou explicite) sert de point de mouvement de translation et de rotation et le second connecteur de positionnement sélectionné (implicite ou explicite) sert de point stationnaire.
Pour fournir une distance de décalage, cochez la case Décalage et fournissez une distance. Les contraintes planaires ne peuvent décaler les entités que le long de l'axe Z.
Les distances de décalage sont visualisées dans la zone graphique sous forme de lignes pointillées entre les contraintes, affichant la valeur et l'axe. Saisissez la distance dans la boîte de dialogue.
Lorsque vous cliquez sur une contrainte, des graphiques s'affichent pour indiquer la direction des valeurs X, Y et Z telles que définies par la contrainte, ainsi que le décalage et la plage de valeurs limites (le cas échéant).
L'application d'un décalage doit être considérée comme un déplacement de l'ensemble du repère. Le décalage est relatif au connecteur de positionnement sélectionné en premier.
Vous pouvez également choisir de faire pivoter la pièce autour d'un axe spécifique : sélectionnez l'axe, puis entrez les degrés de rotation.
- Pour limiter le mouvement, cochez Limites et saisissez (facultatif) les valeurs minimales et maximales pour contrôler la plage de mouvement de la contrainte.
Les limites sont visualisées dans la zone graphique sous forme de lignes pointillées avec des barres aux extrémités. Les lignes pointillées représentent la direction et la distance du mouvement et les lignes pleines représentent la limite.
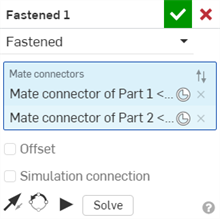
Si une ou plusieurs limites sont appliquées à une contrainte, l'icône de l'indicateur de limite de contrainte
 est visible à droite de la contrainte dans la liste des fonctions de la contrainte.
est visible à droite de la contrainte dans la liste des fonctions de la contrainte.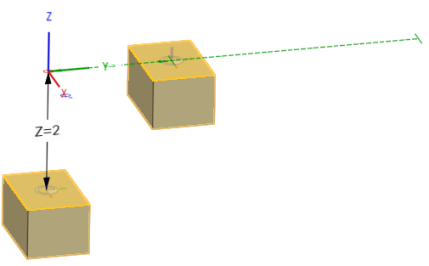
- Cliquez sur l'entité pour accéder au manipulateur.
- Cliquez et faites glisser les différentes poignées du manipulateur pour voir quels mouvements sont autorisés ; notez que seul le mouvement de translation le long des axes X et Y et le mouvement de rotation autour de l'axe Z sont autorisés (Ty, Tx, Rz).
Modifier un connecteur de positionnement
Une fois qu’une contrainte est créée entre deux connecteurs de positionnement explicites ou implicites, vous pouvez modifier l'un ou l'autre de ces connecteurs :
-
Ouvrez la boîte de dialogue Contrainte. Dans l'exemple ci-dessous, la liaison fixe est utilisée à titre d'exemple. Le processus est similaire pour toutes les contraintes, à l'exception de la contrainte tangente qui n'utilise pas de connecteurs de positionnement.
-
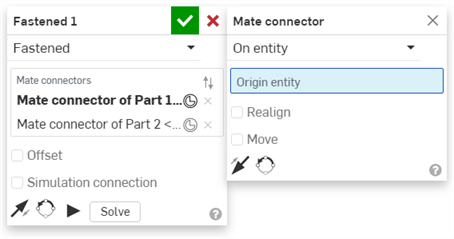
Cliquez sur l'icône de connecteur de positionnement (
 ). La boîte de dialogue du connecteur de positionnement s'ouvre, dans laquelle vous pouvez modifier le type d'origine, l'entité d'origine, l'alignement, la position, la direction de l'axe principal et l'orientation de l'axe secondaire du connecteur de positionnement :
). La boîte de dialogue du connecteur de positionnement s'ouvre, dans laquelle vous pouvez modifier le type d'origine, l'entité d'origine, l'alignement, la position, la direction de l'axe principal et l'orientation de l'axe secondaire du connecteur de positionnement :
La modification des connecteurs de postionnement à partir de la boîte de dialogue Contrainte est limitée aux connecteurs implicites ou explicites situés dans l'assemblage en cours. Les connecteurs de positionnement provenant des Ateliers des piècess, sous-assemblages ou documents liés doivent être modifiés à leur emplacement d'origine.
Étapes
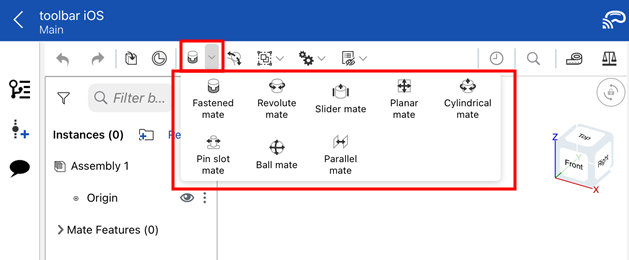
- Appuyez sur l'icône Contrainte planaire (
 ).
). 
- Vérifiiez que Planaire est sélectionné dans le champ Type de contrainte.
- Sélectionnez deux connecteurs de positionnement (implicites ou explicites) à utiliser.
- Si vous le souhaitez, appuyez sur Décalage pour indiquer une distance de décalage.
- Si vous le souhaitez, appuyez sur Limites pour définir des limites de distance pour le déplacement.
- Vous pouvez également appuyer sur
 pour inverser l'axe principal et l'orientation Z des instances.
pour inverser l'axe principal et l'orientation Z des instances. - Le cas échéant, appuyez sur
 pour réorienter l'axe secondaire ; faites pivoter l'orientation du quadrant (dans le plan XY) de 90 degrés en appuyant avec le doigt.
pour réorienter l'axe secondaire ; faites pivoter l'orientation du quadrant (dans le plan XY) de 90 degrés en appuyant avec le doigt. - Appuyez sur la case.
Touchez et faites glisser OU utilisez le Manipulateur du trièdre pour déplacer l'une des pièces. Notez que seuls les mouvements de transition le long des axes X et Y et les mouvements de rotation autour de l'axe Z sont autorisés (Ty, Tx, Rz).
Étapes
- Appuyez sur .
- Vérifiiez que Planaire est sélectionné dans le champ Type de contrainte.
- Sélectionnez deux connecteurs de positionnement (implicites ou explicites) à utiliser.
- Si vous le souhaitez, appuyez sur Décalage pour indiquer une distance de décalage.
- Si vous le souhaitez, appuyez sur Limites pour définir des limites de distance pour le déplacement.
- Vous pouvez également appuyer sur pour inverser l'axe principal et l'orientation Z des instances.
- Le cas échéant, appuyez sur pour réorienter l'axe secondaire ; faites pivoter l'orientation du quadrant (dans le plan XY) de 90 degrés en appuyant avec le doigt.
- Appuyez sur la case.
Touchez et faites glisser OU utilisez le Manipulateur du trièdre pour déplacer l'une des pièces. Notez que seuls les mouvements de transition le long des axes X et Y et les mouvements de rotation autour de l'axe Z sont autorisés (Ty, Tx, Rz).